Alat filtrasi minyak jelantah otomatis
1.
Tujuan
[kembali]
Adapun
rumusan masalah dari makalah ini yaitu:
1.
Membuat Alat filtrasi minyak jelantah
otomatis
2.
Membuat Alat yang menerapkan PWM,
Mikrokontroller, Komunikasi, dan, Sensor
2. Alat dan bahan [kembali]
a) Alat :
i) Sensor MQ7

Sensor MQ7 merupakan sensor gas karbon monoksida yang berfungsi untuk mengetahui konsentrasi gas karbon monoksida (CO), sensor MQ7 memiliki sensitivitas tinggi dan respon cepat terhadap gas karbon monoksida dan keluaran dari sensor MQ7 berupa sinyal analog dan membutuhkan tegangan DC sebesar 5Volt.
Rangkaian Sensor Gas MQ7

Gambar : Rangkaian Sensor MQ7
Pada gambar di atas adalah rangkaian pada sensor gas MQ7. Rangkaian ini bisa disebut juga sebagai rangkaian pengkondisian sinyal. Rangkaian ini dibutuhkan agar sinyal yang masuk ke Analog to Digital Convertion (ADC) Arduino Uno dapat dibaca, maka sinyal tegangan harus dikondisikan sesuai spesifikasi ADC Arduino yaitu 5 volt. Rangkaian pengukuran standar komponen sensitif sensor MQ-7 yang terdiri dari 2 bagian yaitu rangkaian pemanas yang memiliki fungsi kontrol waktu (tegangan tinggi dan tegangan rendah yang bekerja secara sirkular) dan rangkaian sinyal output yang berfungsi untuk merespon perubahan resistansi permukaan sensor. Dari gambar 2.2 Rangkaian Sensor MQ7 dapat di temukan rumus untuk mencari nilai resistansi dari sensor yaitu

dimana Rs merupakan nilai resistansi sensor, Vcc merupakan nilai tegangan yang diberikan sebesar 5 volt, VRl merupakan nilai keluaran tegangan dari sensor dan RL merupakan nilai resistansi dalam sensor yang diberikan sebesar 10 kΩ.
Karakterisasi Sensor MQ7

Dari grafik diatas dapat dilihat bahwa rasio resistansi sensor MQ7 ( Rs Ro ) akan bernilai 1 pada saat konsentrasi gas CO = 100 ppm. Artinya pada saat konsentrasi gas CO = 100 ppm maka nilai Rs = Ro hal ini dibuktikan dengan persamaan berikut.
Prinsip kerja
Pada dasarnya prinsip kerja dari sensor MQ7 adalah mendeteksi keberadaan gas-gas yang dianggap mewakilin asap kendaraan yang mengandung gas karbon monksida. Sensor MQ7 mempunyai tingkat sensitifitas yang tinggi terhadap gas karbon monoksida. Ketika sensor mendeteksi gas tersbut maka resistansi elektrik sensor akan menurun. Didalam sensor memiliki suatu penyerap keramik yang berfungsi untuk melindungi dari debu atau gas yang tidak diketaui. Heater pada sensor ini berfungsi sebagai pemicu sensor untuk dapat mendeteksi target gas yang diharapkan setelah diberikan tegangan 5 Volt.
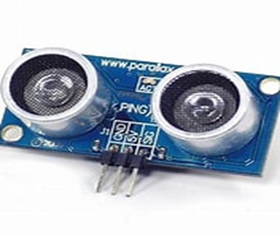
ii) Sensor Ultrasonik
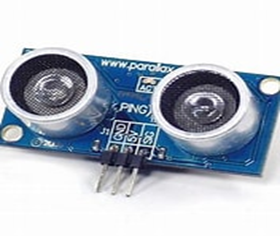
Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip pantulan gelombang suara dan digunakan untuk mendeteksi keberadaan suatu objek tertentu di depannya, frekuensi kerjanya pada daerah gelombang suara dari 40 KHz hingga 400KHz.
Ultrasonik modul umumnya berbentuk papan elektronik ukuran kecil dengan rangkaian elektronik dan 2 buah transducer. Dari 2 buah transducer ini, salah satu berfungsi sebagai transmitter dan satu lagi menjadi receiver sekaligus. Tersedia pin VCC, TRIG, ECHO dan GND. Prinsip kerja sensor ultrasonik ini dapat dilihat pada gambar berikut :
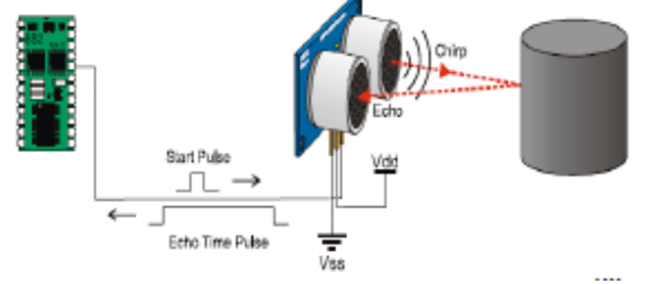
Prinsip kerja sensor ultrasonik yaitu pantulan gelombang suara digunakan untuk mendefinisikan atau jarak suatu objek dengan frekuensi tertentu. Sensor ultrasonik adalah sensor yang bekerja berdasarkan prinsip kerja pantulan gelombang suara, dimana sensor menghasilkan gelombang suara yang kemudian menangkap kembali dengan perbedaan waktu sebagai dasar pengindra. Perbedaan waktu antara gelombang suara yang dipancarkan dan diterima kembali adalah berbanding lurus dengan jarak atau tinggi objek yang memantulkannya. Jenis objek yang dapat diindranya adalah zat padat, zat cair dan butiran. Sensor ultrasonik dapat dengan mudah dihubungkan dengan mikrokontroler melalui satu pin I/O.
iii) Arduino UNO

Arduino adalah kit elektronik atau papan rangkaian elektronik open source yang di dalamnya terdapat komponen utama yaitu sebuah chip mikrokontroler dengan jenis AVR dari perusahaan Atmel. Arduino yang kita gunakan dalam praktikum ini adalah Arduino Uno yang menggunakan chip AVR ATmega 328P. Dalam memprogram Arduino, kita bisa menggunakan komunikasi serial agar Arduino dapat berhubungan dengan komputer ataupun perangkat lain.
(1) Bagian-bagian Arduino Uno
(a) POWER USB
Digunakan untuk menghubungkan Papan Arduino dengan komputer lewat koneksi USB.
(b) POWER JACK
Supply atau sumber listrik untuk Arduino dengan tipe Jack. Input DC 5 - 12 V.
(c) Crystal Oscillator
Kristal ini digunakan sebagai layaknya detak jantung pada Arduino. Jumlah cetak menunjukkan 16000 atau 16000 kHz, atau 16 MHz.
(d) Reset
Digunakan untuk mengulang program Arduino dari awal atau Reset.
(e) Digital Pins I / O
Papan Arduino UNO memiliki 14 Digital Pin. Berfungsi untuk memberikan nilai logika ( 0atau 1 ). Pin berlabel " ~ " adalah pin-pin PWM ( Pulse Width Modulation ) yang dapat digunakan untuk menghasilkan PWM.
(f) Analog Pins
Papan Arduino UNO memiliki 6 pin analog A0 sampai A5. Digunakan untuk membaca sinyal atau sensor analog seperti sensor jarak, suhu dsb, dan mengubahnya menjadi nilai digital.
(g) LED Power Indicator
Lampu ini akan menyala dan menandakan Papan Arduino mendapatkan supply listrik dengan baik
(2) BAGIAN-BAGIAN PENDUKUNG
(a) RAM
RAM (Random Access Memory) adalah tempat penyimpanan sementara pada komputer yang isinya dapat diakses dalam waktu yang tetap, tidak memperdulikan letak data tersebut dalam memori atau acak. Secara umum ada 2 jenis RAM yaitu SRAM (Static Random Acces Memory) dan DRAM (Dynamic Random Acces Memory).
(b) ROM
ROM (Read-only Memory) adalah perangkat keras pada computer yang dapat menyimpan data secara permanen tanpa harus memperhatikan adanya sumber listrik. ROM terdiri dariMask ROM, PROM, EPROM, EEPROM.
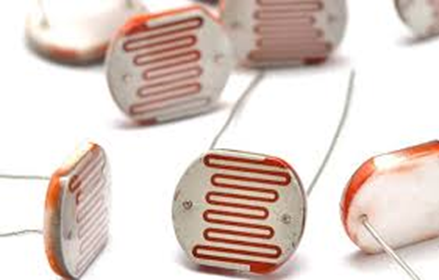
iv) Sensor LDR

LDR (Light Dependent Resistor) merupakan salah satu komponen resistor yang nilai resistansinya akan berubah-ubah sesuai dengan intensitas cahaya yang mengenai sensor ini. LDR juga dapat digunakan sebagai sensor cahaya. Perlu diketahui bahwa nilai resistansi dari sensor ini sangat bergantung pada intensitas cahaya. Semakin banyak cahaya yang mengenainya, maka akan semakin menurun nilai resistansinya. Sebaliknya jika semakin sedikit cahaya yang mengenai sensor (gelap), maka nilai hambatannya akan menjadi semakin besar sehingga arus listrik yang mengalir akan terhambat.
Grafik respon

v) LCD
LCD 16×2 adalah salah satu penampil yang sangat populer digunakan sebagai interface antara mikrokontroler dengan user nya. Dengan penampil LCD 16×2 ini user dapat melihat/memantau keadaan sensor ataupun keadaan jalanya program. Penampil LCD 16×2 ini bisa di hubungkan dengan mikrokontroler apa saja.
(1) Kaki 1 dan 16 terhubung dengan Ground (GND)
(2) Kaki 2 dan 15 terhubung dengan VCC (+5V)
(3) Kaki 3 dari LCD 16×2 adalah pin yang digunakan untuk mengatur kontras kecerahan LCD. Jadi kita bisa memasangkan sebuah trimpot 103 untuk mengatur kecerahanya. Pemasanganya seperti terlihat pada rangkaian tersebut. Karena LCD akan berubah kecerahanya jika tegangan pada pin 3 ini di turunkan atau dinaikan.
(4) Pin 4 (RS) dihubungkan dengan pin mikrokontroler
(5) Pin 5 (RW) dihubungkan dengan GND
(6) Pin 6 (E) dihubungkan dengan pin mikrokontroler
(7) Sedangkan pin 11 hingga 14 dihubungkan dengan pin mikrokontroler sebagai jalur datanya.
vi) Mini Motor Pump (Motor DC)

Pada motor DC, kumparan medan yang dialiri arus listrik akan menghasilkan medan magnet yang melingkupi kumparan jangkar dengan arah tertentu. Konverter energi baik energi listrik menjadi energi mekanik (motor) maupun sebaliknya dari energi mekanik menjadi energi listrik (generator) berlangsung melalui medium medan magnet. Energi yang akan diubah dari suatu sistem ke sistem yang lain, sementara akan tersimpan pad medium medan magnet untuk kemudian dilepaskan menjadi energi system lainya. Dengan demikian, medan magnet disini selain berfungsi sebagi tempat penyimpanan energi juga sekaligus proses perubahan energi, dimana proses perubahan energi pada motor arus searah dapat digambarkan pada gambar

Dalam aplikasinya seringkali sebuah motor digunakan untuk arah yang searah dengan jarum jam maupun sebaliknya. Untuk mengubah putaran dari sebuah motor dapat dilakukan dengan mengubah arah arus yang mengalir melalui motor tersebut.
vii) Motor servo

Motor servo adalah sebuah motor dengan sistem closed feedback di mana posisi dari motor akan diinformasikan kembali ke rangkaian kontrol yang ada di dalam motor servo. Motor ini terdiri dari sebuah motor, serangkaian gear, potensiometer dan rangkaian kontrol. Potensiometer berfungsi untuk menentukan batas sudut dari putaran servo. Sedangkan sudut dari sumbu motor servo diatur berdasarkan lebar pulsa yang dikirim melalui kaki sinyal dari kabel motor. Tampak pada gambar dengan pulsa 1.5 mS pada periode selebar 2 mS maka sudut dari sumbu motor akan berada pada posisi tengah. Semakin lebar pulsa OFF maka akan semakin besar gerakan sumbu ke arah jarum jam dan semakin kecil pulsa OFF maka akan semakin besar gerakan sumbu ke arah yang berlawanan dengan jarum jam.
Motor servo adalah motor yang berputar lambat, dimana biasanya ditunjukkan oleh rate putarannya yang lambat, namun demikian memiliki torsi yang kuat karena internal gearnya. Lebih dalam dapat digambarkan bahwa sebuah motor servo memiliki :
(a) 3 jalur kabel : power, ground, dan control
(b) Sinyal control mengendalikan posisi
(c) Operasional dari servo motor dikendalikan oleh sebuah pulsa selebar ± 20 ms, dimana lebar pulsa antara 0.5 ms dan 2 ms menyatakan akhir dari range sudut maksimum.
(d) Konstruksi didalamnya meliputi internalgear, potensiometer, dan feedback control.
viii) Capasitor 100uF

Kapasitor (Kondensator) yang dalam rangkaian elektronika dilambangkan dengan huruf "C" adalah suatu alat yang dapat menyimpan energi/muatan listrik di dalam medan listrik, dengan cara mengumpulkan ketidakseimbangan internal dari muatan listrik. Kapasitor ditemukan oleh Michael Faraday (1791-1867). Satuan kapasitor disebut Farad (F). Satu Farad = 9 x 1011 cm2 yang artinya luas permukaan kepingan tersebut. Struktur sebuah kapasitor terbuat dari 2 buah plat metal yang dipisahkan oleh suatu bahan dielektrik. Bahan-bahan dielektrik yang umum dikenal misalnya udara vakum, keramik, gelas dan lain-lain. Jika kedua ujung plat metal diberi tegangan listrik, maka muatan-muatan positif akan mengumpul pada salah satu kaki (elektroda) metalnya dan pada saat yang sama muatan-muatan negatif terkumpul pada ujung metal yang satu lagi. Muatan positif tidak dapat mengalir menuju ujung kutub negatif dan sebaliknya muatan negatif tidak bisa menuju ke ujung kutub positif, karena terpisah oleh bahan dielektrik yang non-konduktif. Muatan elektrik ini tersimpan selama tidak ada konduksi pada ujung-ujung kakinya.
ix) Resistor 1k

Resistor merupakan komponen elektronika yang berfungsi untuk menghambataliran arus listrik. Resistor dibuat dengan ukuran badan yang mencerminkankemampuan terhadap daya lesap yang diterimanya jika dialiri listrik yang disebutdengan kemampuan daya listrik. Daya ini akan menaikkan suhu resistor, dan jikamelebihi kemampuan daya yang ditentukan, dapat menyebabkan kerusakan yang permanen.
Resistor banyak dipakai pada komponen dasar elektronika yang digunakan untukmembatasi jumlah arus yang mengalir dalam suatu rangkaian, resistor bersifatresistif dan umumnya terbuat dari bahan karbon. Resistor menghasilkan teganganyang sebanding dengan arus listrik yang melewatinya, satuan resistansi dari suaturesistor disebut ohm atau dilambangkan dengan Ω (omega). Kemampuan resistordalam menghambat arus listrik sangatlah beragam disesuaikan dengan nilairesistansi resistor tersebut
x) Potensiometer

Potensiometer adalah salah satu jenis resistor tiga terminal yang berfungsi untuk mengatur tegangan, arus dan resistensi listrik dalam sebuah rangkaian.
Rangkaian potensiometer umumnya dibuat dengan menggunakan tiga komponen dasar, yakni elemen resistif, penyapu (wiper), dan terminal.

Elemen resistif sendiri bentuknya dibuat menjadi jalur melingkar. Terbuat juga dari bahan yang sifatnya resistif, biasanya grafit, plastik partikel karbon, kawat resistansi.
Pada ujung elemen resistif terhubung dengan kaki potensiometer yang nantinya disambungkan pada rangkaian.
Kemudian terdapat satu terminal di tengah yang merupakan penyapu (wiper). Fungsinya yakni untuk mengatur besar-kecilnya nilai resistansi.
Cara kerja potensiometer adalah dengan mengendalikan besar hambatan atau resistansi pada sebuah rangkaian elektronika. Semakin besar hambatan yang diterima, maka besar tegangan yang dikeluarkan semakin kecil. Begitu pun sebaliknya.
Wiper bertugas dalam mengendalikan besar hambatan tersebut. Posisi wiper yang berubah-ubah akan menentukan besar luaran yang dihasilkan. Maka, cara menggunakan potensiometer yaitu dengan menggeser wiper agar hasilnya sesuai dengan yang diinginkan.
xi) Jumper

Kabel jumper adalah kabel elektrik yang memiliki pin konektor di setiap ujungnya dan memungkinkan untuk menghubungkan dua komponen yang melibatkan Arduino tanpa memerlukan solder.
Biasanya kabel jamper digunakan pada breadboard atau alat prototyping lainnya agar lebih mudah untuk mengutak-atik rangkaian.
Konektor yang ada pada ujung kabel terdiri atas dua jenis yaitu konektor jantan (male connector) dan konektor betina (female connector).
xii) Breadboard

Breadboard terdiri dari lubang yang digunakan untuk menempatkan terminal komponen dan kemudian lubang ini dihubungkan satu sama lain menggunakan berbagai kabel/kawat.

Dua baris pertama (atas) dan dua baris terakhir (bawah) papan breadboard digunakan untuk positif (satu baris pertama dan terakhir dua) dan untuk negatif (baris lain dari dua pertama dan terakhir).
Pada gambar breadboar di atas, dua baris pertama (atas) dan terakhir (bawah) papan breadboard terdiri dari 5 lubang di setiap kolom (total 10 kolom) saling terhubung secara horizontal satu sama lain secara internal.
Jika terminal sumber daya terhubung dalam satu lubang satu kolom di baris atas atau bawah (salah satu dari dua baris), maka daya listrik yang sama dapat diambil dari lima lubang berturut-turut di kolom yang sama.
xiii) Baterai Lithium ion 3V

Baterai lithium adalah salah satu teknologi baterai yang cukup sukses selama 20 tahun belakangan ini. Lithium adalah jenis metal reaktif yang dapat menghasilkan panas berlebihan jika bereaksi dengan air atau uap air. Oleh karena itu, dalam membuat baterai lithium pasti dilakukan dalam ruangan kering (dry room) dimana kelembapannya dijaga tidak kurang dari 5%. Sejak diproduksi tahun 1991, lithium-ion baterai tidak mengalami perubahan signifikan pada sifat kerja baterai. Ada 3 elemen yang berperan dalam proses discharge dan recharge yaitu:
(1) Elektroda positif yang mengandung LiCoO2
(2) Elektroda negatif yang terbuat dari karbon grafit ( C6), dan
(3) Separator yang terbuat dari lapisan tipis plastik yang dapat dilalui oleh ion-ion.
Pada proses discharge atau saat memakai baterai, Li+ ion bergerak dari negatif ke positif melalui separator, sehingga elektron bergerak dengan arah yang sama. Aliran elektron ini yang menghasilkan energi listrik.
Tabel jumlah dan biaya komponen- komponen yang digunakan :
Komponen | banyak komponen | harga per satuan | total |
Sensor MQ-7 | 1 | Rp 23.000 | Rp 23.000 |
Sensor Ultrasonik | 1 | Rp 18.500 | Rp 18.500 |
Sensor LDR | 1 | Rp 450 | Rp 450 |
Arduino UNO | 2 | Rp 133.500 | Rp 267.000 |
LCD 16 x 2 | 1 | Rp 18.100 | Rp 18.100 |
Mini motor pump | 1 | Rp 10.000 | Rp 10.000 |
Motor servo | 1 | Rp 15.000 | Rp 15.000 |
Kapasitor 100uF | 1 | Rp 150 | Rp 150 |
Resistor 1k ohm | 1 | Rp 99 | Rp 99 |
Potensiometer | 2 | Rp 1500 | Rp 3000 |
Jumper | 50 | Rp 300 | Rp 15.000 |
Breadboard | 2 | Rp 9900 | Rp 19.800 |
Baterai Lithium ion 3V | 3 | Rp 1700 | Rp 5100 |
Jumlah | 67 | Rp 232.199 | Rp 395.199 |
b) Bahan :
i) Arang Aktif
Arang aktif dapat digunakan sebagai adsorben (daya serap). Arang aktif dipakai dalam proses pemurnian udara, gas, larutan atau cairan (Kusnaedi, 2010). Arang aktif dapat mengadsorpsi bau, rasa, warna, dan beberapa zat organik. Kualitas dari arang aktif sangat dipengaruhi oleh bahan baku yang digunakan, cara pembuatan, arang aktif yang digunakan dan cara pengaktifannya.
ii) Zeolit
Zeolit merupakan mineral alam yang banyak terdapat di Indonesia, berbentuk kristal aluminium silikat. Struktur kristalnya menyebabkan zeolit berpori-pori dan adanya logam transisi yang menyisip dalam matriks molekulnya dapat membentuk pori makro. Karena pori- pori tersebut zeolit dapat bersifat sebagai adsorben (penyerap). Perlakuan dengan asam dan panas dapat mengaktifkan zeolit, yaitu meningkatkan kapasitas adsorpsinya (Setiadji, 1996).
iii) Bentonit
Secara fisik bentonit yang digunakan mempunyai ciri berwarna merah kecoklatan dan berbentuk bubuk/powder padat. Pada keadaan normal normal ruang-ruang kosong kristal bentonit terisi penuh oleh molekul air akibat proses hidrasi udara sekitar. Apabila molekul air tersebut terurai kemudian air meninggalkan rongga, maka memberikan efek luas permukaan yang spesifik dari bentonit sehingga memiliki sifat mampu menyerap terutama terhadap molekul yang berukuran lebih kecil dari rongga. Karena hal tersebut, bentonit dikatakan mempunyai daya saring molekular. Penggunaan bentonit untuk keperluan suatu industri terutama berdasarkan sifat fisiknya. Di antaranya sifat fisik yang memegang peranan penting adalah kapasitas pertukaran ion atau kation, daya serap, luas permukaan, reologi, sifat mengikat dan melapis, serta plastisitas.
3.
3. Dasar teori
[kembali]
a) LDR
LDR (Light Dependent Resistor) merupakan salah satu komponen resistor yang nilai resistansinya akan berubah-ubah sesuai dengan intensitas cahaya yang mengenai sensor ini. LDR juga dapat digunakan sebagai sensor cahaya. Perlu diketahui bahwa nilai resistansi dari sensor ini sangat bergantung pada intensitas cahaya. Semakin banyak cahaya yang mengenainya, maka akan semakin menurun nilai resistansinya. Sebaliknya jika semakin sedikit cahaya yang mengenai sensor (gelap), maka nilai hambatannya akan menjadi semakin besar sehingga arus listrik yang mengalir akan terhambat.
Beberapa karakteristik yang terdapat pada sensor LDR antara lain adalah :
· Tegangan maksimum (DC) : 150 V
· Konsumsi Arus Maksimum : 100 mW
· Tingkatan Resistansi / Tahanan : 10 Ohm hingga 100k Ohm
· Puncak Spektral : 540 nm (ukuran gelombang cahaya)
· Waktu Respon Sensor : 20ms – 30 ms
· Suhu Operasi : -30o Celcius – 70o Celcius
Fungsi Sensor LDR
LDR berfungsi sebagai sebuah sensor cahaya dalam berbagai macam rangkaian elektronika seperti saklar otomatis berdasarkan cahaya yang jika sensor terkena cahaya maka arus listrik akan mengalir(ON) dan sebaliknya jika sensor dalam kondisi minim cahaya(gelap) maka aliran listrik akan terhambat(OFF). LDR juga sering digunakan sebagai sensor lampu penerang jalan otomatis, lampu kamar tidur, alarm, rangkaian anti maling otomatis menggunakan laser, sutter kamera otomatis, dan masih banyak lagi yang lainnya.
Cara Kerja Sensor LDR
Prinsip kerja LDR sangat sederhana tak jauh berbeda dengan variable resistor pada umumnya. LDR dipasang pada berbagai macam rangkaian elektronika dan dapat memutus dan menyambungkan aliran listrik berdasarkan cahaya. Semakin banyak cahaya yang mengenai LDR maka nilai resistansinya akan menurun, dan sebaliknya semakin sedikit cahaya yang mengenai LDR maka nilai hambatannya akan semakin membesar.
Grafik Kerja LDR


b) Sensor Ultrasonik

Pada sensor ultrasonik, gelombang ultrasonik dibangkitkan melalui sebuah alat yang disebut dengan piezoelektrik dengan frekuensi tertentu. Piezoelektrik ini akan menghasilkan gelombang ultrasonik (umumnya berfrekuensi 40kHz) ketika sebuah osilator diterapkan pada benda tersebut. Secara umum, alat ini akan menembakkan gelombang ultrasonik menuju suatu area atau suatu target. Setelah gelombang menyentuh permukaan target, maka target akan memantulkan kembali gelombang tersebut. Gelombang pantulan dari target akan ditangkap oleh sensor, kemudian sensor menghitung selisih antara waktu pengiriman gelombang dan waktu gelombang pantul diterim

Secara detail, cara kerja sensor ultrasonik adalah sebagai berikut:
o Sinyal dipancarkan oleh pemancar ultrasonik dengan frekuensi tertentu dan dengan durasi waktu tertentu. Sinyal tersebut berfrekuensi diatas 20kHz. Untuk mengukur jarak benda (sensor jarak), frekuensi yang umum digunakan adalah 40kHz.
o Sinyal yang dipancarkan akan merambat sebagai gelombang bunyi dengan kecepatan sekitar 340 m/s. Ketika menumbuk suatu benda, maka sinyal tersebut akan dipantulkan oleh benda tersebut.
o Setelah gelombang pantulan sampai di alat penerima, maka sinyal tersebut akan diproses untuk menghitung jarak benda tersebut. Jarak benda dihitung berdasarkan rumus :
S = 340.t/2
dimana S merupakan jarak antara sensor ultrasonik dengan benda (bidang pantul), dan t adalah selisih antara waktu pemancaran gelombang oleh transmitter dan waktu ketika gelombang pantul diterima receiver.
c) Sensor MQ-7
Sensor MQ-7 merupakan sensor gas yang digunakan dalam peralatan untuk mendeteksi gas karbon monoksida (CO) dalam kehidupan sehari-hari, industri, atau mobil. Fitur dari sensor gas MQ-7 ini adalah mempunyai sensitivitas yang tinggi terhadap karbon monoksida (CO), stabil, dan berumur panjang.
Sensor ini menggunakan catu daya heater : 5V AC/DC dan menggunakan catu daya rangkaian : 5 VDC, jarak pengukuran : 20 - 2000 ppm untuk ampuh mengukur gas karbon monoksida.

Prinsip Kerja Sensor MQ-7

Rangkaian dasar MQ7
Hambatan permukaan sensor Rs diperoleh melalui dipengaruhi sinyal output tegangan dari resistansi beban RL yang seri. Hubungan antara itu dijelaskan pada persamaan dibawah:
Rs\RL = (Vc-VRL) / VRL .
Sinyal ketika sensor digeser dari udara bersih untuk karbon monoksida (CO), pengukuran sinyal dilakukan dalam waktu satu atau dua periode pemanasan lengkap (2,5 menit dari tegangan tinggi ke tegangan rendah). Lapisan sensitif dari MQ-7 komponen gas sensitif terbuat dari SnO2 dengan stabilitas. Jadi, MQ-7 memiliki stabilitas jangka panjang yang sangat baik. Masa servis bisa mencapai 5 tahun di bawah kondisi penggunaan. Penyesuaian sensitivitas nilai resistansi MQ7 adalah perbedaan untuk berbagai jenis dan berbagai gas konsentrasi. Ketika secara akurat mengukur, titik alarm yang tepat untuk detektor gas harus ditentukan setelah mempertimbangkan pengaruh suhu dan kelembaban.
d) Arduino Uno

Arduino Uno adalah board mikrokontroler berbasis ATmega328 (datasheet). Arduino uno memiliki 14 pin input dari output digital dimana 6 pin input tersebut dapat digunakan sebagai output PWM dan 6 pin input analog, 16 MHz osilator kristal, koneksi USB, jack power, ICSP header, dan tombol reset. Untuk mendukung mikrokontroler agar dapat digunakan, cukup hanya menghubungkan Board Arduino Uno ke komputer dengan menggunakan kabel USB atau listrik dengan AC yang-ke adaptor-DC atau baterai untuk menjalankannya.
Setiap 14 pin digital pada arduino uno dapat digunakan sebagai input dan output, menggunakan fungsi pinMode(), digitalwrite(), dan digitalRead(). Fungsi fungsi tersebut beroperasi di tegangan 5 volt, Setiap pin dapat memberikan atau menerima suatu arus maksimum 40 mA dan mempunyai sebuah resistor pull-up (terputus secara default) 20-50 kOhm.
Input dan Output
Setiap 14 pin digital pada ArduinoUno dapat digunakan sebagai input atau output, menggunakan fungsi pinMode(), digitalWrite(), dan digitalRead(). Input/output dioperasikan pada 5 volt. Setiap pin dapat menghasilkan atau menerima maksimum 40 mA dan memiliki internal pull-up resistor 20-50 Kohms.
Catu Daya
ArduinoUno dapat beroperasi melalui koneksi USB atau power supply. Dalam penggunaan power supply dapat menggunakan adaptor DC atau baterai. Adaptor dapat dihubungkan dengan jack adaptor pada koneksi port input supply.
Memory
Arduino memiliki 32 KB flash memory4 untuk menyimpan kode, juga 2 KB yang digunakan untuk bootloader.Arduino memiliki 2 KB untuk SRAM dan 1 KB untuk EEPROM.
Perangkat Lunak (Arduino Software)
Lingkungan open-source Arduino atau Arduino IDE5 memudahkan untuk menulis kode dengan meng-upload ke I/O board. Ini berjalan pada Windows, Mac OS X, dan Linux. Berdasarkan pengolahan, avr-gcc, dan perangkat lunak open-source lainnya.
Pemograman
Arduino Uno dapat diprogram dengan perangkat lunak Arduino. Pilih ArduinoUno dari Tool lalu sesuaikan denganMicrocontroller yang digunakan.
Resetter
Tombol reset Arduino Uno dirancang dengan cara yang memungkinkan untuk mengatur ulang oleh perangkat lunak yang berjalan pada computer yang terhubung.
Arduino IDE
IDE (Ingrated Development Environment) yang diperuntukan untuk membuat perintah atau source code, melakukan pengecekan kesalahan,kompilasi,upload program, dan menguji hasil kerja arduino melalui serial monitor
e) LCD 16x2
LCD (Liquid Crystal Display) merupakan komponen elektronika yang berfungsi untuk menampilkan suatu data dapat berupa karakter, huruf, symbol maupun grafik. Karena ukurannya yang kecil maka LCD banyak dipasangkan dengan Mikrokontroller. LCD tersedia dalam bentuk modul yang mempunyai pin data, control catu daya, dan pengatur kontras.

Keterangan PIN LCD 16x2
i) GND : catu daya 0Vdc
ii) VCC : catu daya positif
iii) Constrate : untuk kontras tulisan pada LCD
iv) RS atau Register Select :
(1) High : untuk mengirim data
(2) Low : untuk mengirim instruksi
v) R/W atau Read/Write
(1) High : mengirim data
(2) Low : mengirim instruksi
(3) Disambungkan dengan LOW untuk pengiriman data ke layar
vi) E (enable) : untuk mengontrol ke LCD ketika bernilai LOW, LCD tidak dapat diakses
vii) D0 – D7 = Data Bus 0 – 7
viii) Backlight + : disambungkan ke VCC untuk menyalakan lampu latar.
ix) Backlight – : disambungkan ke GND untuk menyalakan lampu latar
f) L293D Motor Driver

Gambar IC L293D
IC L293D adlah IC yang didesain khusus sebagai driver motor DC dan dapat dikendalikan dengan rangkaian TTL maupun mikrokontroler. Motor DC yang dikontrol dengan driver IC L293D dapat dihubungkan ke ground maupun ke sumber tegangan positif karena di dalam driver L293D sistem driver yang digunakan adalah totem pool. Dalam 1 unit chip IC L293D terdiri dari 4 buah driver motor DC yang berdiri sendiri sendiri dengan kemampuan mengalirkan arus 1 Ampere tiap drivernya. Sehingga dapat digunakan untuk membuat driver H-bridge untuk 2 buah motor DC. Konstruksi pin driver motor DC IC l293D adalah sebagai berikut.

Fungsi PIN
(1) Pin EN (Enable, EN1.2, EN3.4) berfungsi untuk mengijinkan driver menerima perintah untuk menggerakan motor DC.
(2) Pin In (Input, 1A, 2A, 3A, 4A) adalah pin input sinyal kendali motor DC
(3) Pin Out (Output, 1Y, 2Y, 3Y, 4Y) adalah jalur output masing-masing driver yang dihubungkan ke motor DC
(4) Pin VCC (VCC1, VCC2) adalah jalur input tegangan sumber driver motor DC, dimana VCC1 adalah jalur input sumber tegangan rangkaian kontrol dirver dan VCC2 adalah jalur input sumber tegangan untuk motor DC yang dikendalikan.
(5) Pin GND (Ground) adalah jalu yang harus dihubungkan ke ground, pin GND ini ada 4 buah yang berdekatan dan dapat dihubungkan ke sebuah pendingin kecil.
g) Resistor

Resistor adalah komponen elektronika yang berfungsi untuk menghambat atau membatasi aliran listrik yang mengalir dalam suatu rangkaian elektronika. Satuan atau nilai resistansi suatu resistor disebut Ohm dilambangkan dengan simbol Omega (Ω).
Simbol Resistor :

Cara Menentukan Nilai Resistor :
· Dengan Kode Warna :
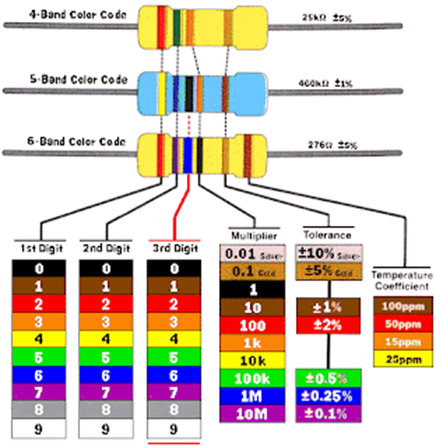
· Resistor dengan 4 cincin kode warna
Maka cincin ke 1 dan ke 2 merupakan digit angka, dan cincin kode warna ke 3 merupakan faktor pengali kemudian cincin kode warnake 4 menunjukan nilai toleransi resistor.
· Resistor dengan 5 cincin kode warna
Maka cincin ke 1, ke 2 dan ke 3 merupakan digit angka, dan cincin kode warna ke 4 merupakan faktor pengali kemudian cincin kode warna ke 5 menunjukan nilai toleransi resistor.
· Resistor dengan 6 cincin warna
Resistor dengan 6 cicin warna pada prinsipnya sama dengan resistor dengan 5 cincin warna dalam menentukan nilai resistansinya. Cincin ke 6 menentukan coefisien temperatur yaitu temperatur maksimum yang diijinkan untuk resistor tersebut.
· Dengan Kode Huruf Resistor

Kode Huruf Untuk Nilai Resistansi :
o R, berarti x1 (Ohm)
o K, berarti x1000 (KOhm)
o M, berarti x 1000000 (MOhm)
Kode Huruf Untuk Nilai Toleransi :
o F, untuk toleransi 1%
o G, untuk toleransi 2%J, untuk toleransi 5%
o K, untuk toleransi 10%
o M, untuk toleransi 20%
Rumus Menentukan Nilai Resitor :
o Resistor Seri R(total) = R1+R2+ R(selanjut nya).
o Resistor Paralel R(total) = 1/R(total) = 1/R1 + 1/R2 + 1/R(seterusnya).
h) Transistor

Transistor merupakan alat semikonduktor yang dapat digunakan sebagai penguat sinyal, pemutus atau penyambung sinyal, stabilisasi tegangan, dan fungsi lainnya. Transistor memiliki 3 kaki elektroda, yaitu basis, kolektor, dan emitor. Pada rangkaian kali ini digunakan transistor 2SC1162 bertipe NPN. Transistor ini diperumpamakan sebagai saklar, yaitu ketika kaki basis diberi arus, maka arus pada kolektor akan mengalir ke emiter yang disebut dengan kondisi ON. Sedangkan ketika kaki basis tidak diberi arus, maka tidak ada arus mengalir dari kolektor ke emitor yang disebut dengan kondisi OFF. Namun, jika arus yang diberikan pada kaki basis melebihi arus pada kaki kolektor atau arus pada kaki kolektor adalah nol (karena tegangan kaki kolektor sekitar 0,2 - 0,3 V), maka transistor akan mengalami cutoff (saklar tertutup).
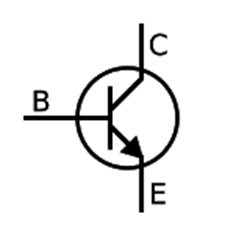
Transistor adalah sebuah komponen di dalam elektronika yang diciptakan dari bahan-bahan semikonduktor dan memiliki tiga buah kaki. Masing-masing kaki disebut sebagai basis, kolektor, dan emitor.
· Emitor (E) memiliki fungsi untuk menghasilkan elektron atau muatan negatif.
· Kolektor (C) berperan sebagai saluran bagi muatan negatif untuk keluar dari dalam transistor.
· Basis (B) berguna untuk mengatur arah gerak muatan negatif yang keluar dari transistor melalui kolektor.
i) Motor Pump DC (Motor DC)

Motor Listrik DC atau DC Motor adalah suatu perangkat yang mengubah energi listrik menjadi energi kinetik atau gerakan (motion). Motor DC ini juga dapat disebut sebagai Motor Arus Searah. Seperti namanya, DC Motor memiliki dua terminal dan memerlukan tegangan arus searah atau DC (Direct Current) untuk dapat menggerakannya. Motor Listrik DC ini biasanya digunakan pada perangkat-perangkat Elektronik dan listrik yang menggunakan sumber listrik DC seperti Vibrator Ponsel, Kipas DC dan Bor Listrik DC.

Prinsip Kerja Motor DC
Terdapat dua bagian utama pada sebuah Motor Listrik DC, yaitu Stator dan Rotor. Stator adalah bagian motor yang tidak berputar, bagian yang statis ini terdiri dari rangka dan kumparan medan. Sedangkan Rotor adalah bagian yang berputar, bagian Rotor ini terdiri dari kumparan Jangkar. Dua bagian utama ini dapat dibagi lagi menjadi beberapa komponen penting yaitu diantaranya adalah Yoke (kerangka magnet), Poles (kutub motor), Field winding (kumparan medan magnet), Armature Winding (Kumparan Jangkar), Commutator (Komutator) dan Brushes (kuas/sikat arang).
Pada prinsipnya motor listrik DC menggunakan fenomena elektromagnet untuk bergerak, ketika arus listrik diberikan ke kumparan, permukaan kumparan yang bersifat utara akan bergerak menghadap ke magnet yang berkutub selatan dan kumparan yang bersifat selatan akan bergerak menghadap ke utara magnet. Saat ini, karena kutub utara kumparan bertemu dengan kutub selatan magnet ataupun kutub selatan kumparan bertemu dengan kutub utara magnet maka akan terjadi saling tarik menarik yang menyebabkan pergerakan kumparan berhenti.
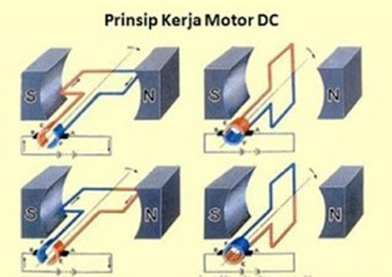
Untuk menggerakannya lagi, tepat pada saat kutub kumparan berhadapan dengan kutub magnet, arah arus pada kumparan dibalik. Dengan demikian, kutub utara kumparan akan berubah menjadi kutub selatan dan kutub selatannya akan berubah menjadi kutub utara. Pada saat perubahan kutub tersebut terjadi, kutub selatan kumparan akan berhadap dengan kutub selatan magnet dan kutub utara kumparan akan berhadapan dengan kutub utara magnet. Karena kutubnya sama, maka akan terjadi tolak menolak sehingga kumparan bergerak memutar hingga utara kumparan berhadapan dengan selatan magnet dan selatan kumparan berhadapan dengan utara magnet. Pada saat ini, arus yang mengalir ke kumparan dibalik lagi dan kumparan akan berputar lagi karena adanya perubahan kutub. Siklus ini akan berulang-ulang hingga arus listrik pada kumparan diputuskan.
j) Potensiometer

Pada dasarnya bagian-bagian penting dalam Komponen Potensiometer adalah :
· Penyapu atau disebut juga dengan Wiper
· Element Resistif
· Terminal
Jenis-jenis Potensiometer :
i) Potensiometer Slider, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara menggeserkan Wiper-nya dari kiri ke kanan atau dari bawah ke atas sesuai dengan pemasangannya. Biasanya menggunakan Ibu Jari untuk menggeser wiper-nya.
ii) Potensiometer Rotary, yaitu Potensiometer yang nilai resistansinya dapat diatur dengan cara memutarkan Wiper-nya sepanjang lintasan yang melingkar. Biasanya menggunakan Ibu Jari untuk memutar wiper tersebut. Oleh karena itu, Potensiometer Rotary sering disebut juga dengan Thumbwheel Potentiometer.
iii) Potensiometer Trimmer, yaitu Potensiometer yang bentuknya kecil dan harus menggunakan alat khusus seperti Obeng (screwdriver) untuk memutarnya. Potensiometer Trimmer ini biasanya dipasangkan di PCB dan jarang dilakukan pengaturannya.
Fungsi-fungsi Potensiometer :
i) Sebagai pengatur Volume pada berbagai peralatan Audio/Video seperti Amplifier, Tape Mobil, DVD Player.
ii) Sebagai Pengatur Tegangan pada Rangkaian Power Supply
iii) Sebagai Pembagi Tegangan
iv) Aplikasi Switch TRIAC
v) Digunakan sebagai Joystick pada Tranduser
vi) Sebagai Pengendali Level Sinyal
k) Kapasitor (Kondensator)

Pengertian kapasitor adalah suatu komponen elektronika yang dapat menyimpan dan melepaskan muatan listrik atau energi listrik.
Kapasitor memiliki berbagai macam ukuran dan bentuk tergantung dari kapasitas, tegangan kerja dan faktor lainnya yang berpengaruh. Kapasitor sering disebut juga dengan kondensator. Fungsi kapasitor untuk menyimpan muatan listrik disebut dengan kapasitansi atau kapasitas. Kapasitor memiliki simbol C (Capasitor) sedangkan fungsi kapasitor dalam menyimpan muatan listrik disimbolkan oleh F (Farad). Disimbolkan dengan Farad karena yang menemukan kapasitor adalah Michael Faraday (1791 – 1867).
Bentuk kapasitor adalah dua buah lempengan logam yang saling sejajar dan diantara dua lempengan tersebut terdapat bahan isolator yang disebut dengan dielektrik. Dielektrik ini adalah bahan yang bisa mempengaruhi nilai kapasistansi kapasitor. Bahan dielektrik pun bermacam-macam, bisa terbuat dari mika, film, kertas, udara, gelas, vakum, keramik, dan sebagainya. Dengan adanya dielektrik ini, kapasitor dapat dibedakan antara kapasitor yang satu dengan yang lainnya.
Fungsi kapasitor antara lain :
i) Sebagai filter atau penyaring, biasanya digunakan pada sistem radio, TV, amplifier dan lain-lain. Filter pada radio digunakan untuk menyaring (penghambatan) gangguan-gangguan dari luar.
ii) Sebagai kopling, kapasitor sebagai kopling ( penghubung ) amplifier tingkat rendah ketingkat yang lebih tinggi.
iii) Pada lampu neon, fungsi kapasitor untuk penghemat daya listrik
iv) Dalam rangkaian antena, fungsi kapasitor sebagai pembangkit frekuensi
Cara Kerja Kapasitor
Kapasitor bekerja dalam suatu rangkaian elektronika dengan cara mengalirkan elektron menuju ke kapasitor. Setelah kapasitor sudah dipenuhi dengan elektron, tegangan akan mengalami perubahan. Lalu, elektron yang tadinya ada dalam kapasitor akan keluar dan mengalir menuju rangkaian atau komponen yang membutuhkannya.
Jenis-Jenis Kapasitor
(1) Kapasitor Tetap

Kapasitor tetap merupakan kapasitor yang mempunyai nilai kapasitas yang tetap. Pada umumnya kapasitor yang terbuat dari bahan mika, gelas, dan film nilainya kurang dari 1 mikrofarad (1µF). Satuan kapasitor adalah Farad, dimana 1 farad = 103 mF = 106µF = 109 nF =1012 pF. Untuk mengetahui besarnya nilai kapasitas atau kapasitansi pada kapasitor dapat dibaca melalui kode angka pada badan kapasitor tersebut yang terdiri dari 3 angka. Angka pertama dan kedua menunjukkan angka atau nilai, angka ketiga menunjukkan faktor pengali atau jumlah nol, dan satuan yang digunakan ialah pikofarad (pF).

(2) Kapasitor tidak tetap
(a) Kapasitor Trimer
Kapasitor yang nilai kapasitansinya dapat diubah-ubah dengan cara memutar porosnya dengan obeng.

(b) Variabel Capasitor (Varco)
Jenis kapasitor yang nilai kapasitansinya dapat diubah-ubah dengan memutar poros yang tersedia. Bentuk menyerupai potensiometer.

4. Gambar rangkaian.[kembali]

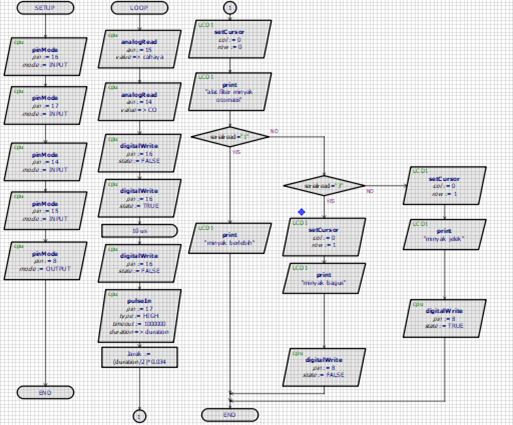
5. Prinsip kerja. [kembali]
Alat ini akan menggunakan tegangan supply listrik dari pln. Supply ini memanfaatkan adapter untuk suply mikrokontroler dan motor pump. Ultra sonik akan mendeteksi jarak antara minyak dengan ultrasonik. Maka pada saat mendeteksi minyak dalam jarak kurang dari 6 cm maka akan menampilkan minyak berlebih dan ldr dan mq7 tidak dapat mendeteksi kekeruhan dan kadar co dari minyak setelah filter. Pada saat minyak jaraknya lebih dari 6 cm. Maka minyak jelantah akan mulai masuk ke alat filter dan filter akan menetralkan kadar co dan kekeruhan minyak jelantah. Pada saat minyak sudah di filter maka ldr dam mq7 mulai melakukan pengecekan standar minyak mutu.
Jika minyak tidak baik atau kotor maka lcd akan menampilkan tulisan minyak jelek dan motor pump dalam keadaan aktif dan mengangkat minyak tersebut kembali ke fase filtrasi. Pada saat minyak itu sudah difiltrasi maka mq7 dam ldr mulai mendeteksi mutu dari minyak. Dan jika sudah memenuhi standar maka minyak tersebut akan di deteksi minyak baik dan di tulis pada layar monitor lcd. Maka minyak tersebut dapat dikonsumsi dengan baik. Sehingga output dari alat ini yaitu lcd yang akan menampilkan minyak berlebih, minyak bagus dan minyak jelek, motor pump yang akan memompa minyak keatas.




adapun program
//MASTER
#include <MQUnifiedsensor.h>
#define Board ("Arduino UNO")
#define Pin (A2) //Analog input 3 of your arduino
#define Type ("MQ-2") //MQ2
#define Voltage_Resolution (5)
#define ADC_Bit_Resolution (10) // For arduino UNO/MEGA/NANO
#define RatioMQ2CleanAir (9.83) //RS / R0 = 9.83 ppm
MQUnifiedsensor MQ2(Board,
Voltage_Resolution, ADC_Bit_Resolution, Pin, Type);
char jenisgas[6][10] = {"H2","LPG","CO","Alcohol","Propane"};
float gasA[6] = {987.99, 574.25 ,
36974 , 3616.1 , 658.71 };
float gasB[6] = {-2.162, -2.222 ,
-3.109 , -2.675 , -2.168 };
int itemcheck = 2;
byte ldr = A1;
const int trigPin = 4;
const int echoPin = 3;
int nilai;
long duration; // variabel untuk
durasi perjalanan gelombang suara
int distance; // variabel untuk
pengukuran jarak
void setup() //Semua kode dalam fungsi ini
dieksekusi sekali
{
pinMode(trigPin, OUTPUT); // Menetapkan trigPin sebagai OUTPUT
pinMode(echoPin, INPUT); // Menetapkan echoPin sebagai INPUTINPUT
//Init the serial port communication - to debug the library
Serial.begin(9600); //Init serial port
//Set math model to calculate the PPM concentration and the value of
constants
MQ2.setRegressionMethod(1); //_PPM =
a*ratio^b
MQ2.setA(574.25); MQ2.setB(-2.222); // Configurate the ecuation values
to get LPG concentration
/*
Exponential regression:
Gas | a | b
H2 | 987.99 | -2.162
LPG | 574.25 | -2.222
CO | 36974 | -3.109
Alcohol| 3616.1 | -2.675
Propane| 658.71 | -2.168
*/
/***************************** MQ
Init ********************************************/
//Remarks: Configure the pin of arduino as input.
/************************************************************************************/
MQ2.init();
/*
//If the RL value is different from 10K please assign your RL value with
the following method:
MQ2.setRL(10);
*/
/***************************** MQ
CAlibration ********************************************/
// Explanation:
// In this routine the sensor will measure the resistance of the sensor
supposing before was pre-heated
// and now is on clean air (Calibration conditions), and it will setup
R0 value.
// We recomend execute this routine only on setup or on the laboratory
and save on the eeprom of your arduino
// This routine not need to execute to every restart, you can load your
R0 if you know the value
// Acknowledgements:
https://jayconsystems.com/blog/understanding-a-gas-sensor
float calcR0 = 0;
for(int i = 1; i<=10; i ++)
{
MQ2.update(); // Update data, the arduino will be read the voltage on
the analog pin
calcR0 += MQ2.calibrate(RatioMQ2CleanAir);
}
MQ2.setR0(calcR0/10);
if(isinf(calcR0)) {Serial.println("Warning: Conection issue
founded, R0 is infite (Open circuit detected) please check your wiring and
supply"); while(1);}
if(calcR0 == 0){Serial.println("Warning: Conection issue founded,
R0 is zero (Analog pin with short circuit to ground) please check your wiring
and supply"); while(1);}
/***************************** MQ
CAlibration ********************************************/
//MQ2.serialDebug(true);
}
void loop() //Semua kode dalam fungsi ini
dieksekusi berulang
{
MQ2.update(); // Update data, the arduino will be read the voltage on
the analog pin
float hasil = MQ2.readSensor(); // Sensor will read PPM concentration
using the model and a and b values setted before or in the setup
//MQ2.serialDebug(); // Will print the table on the serial port
delay(500); //Sampling frequency
nilai = analogRead(ldr);
digitalWrite(trigPin, LOW);
delayMicroseconds(2);
// Menyetel trigPin TINGGI (AKTIF) selama 10 mikrodetik
digitalWrite(trigPin, HIGH);
delayMicroseconds(10);
digitalWrite(trigPin, LOW);
duration = pulseIn(echoPin, HIGH);
// Menghitung jarak
distance = duration * 0.034 / 2;
if (distance <= 5)
{
Serial.print("1");
}
else if (distance > 5)
{
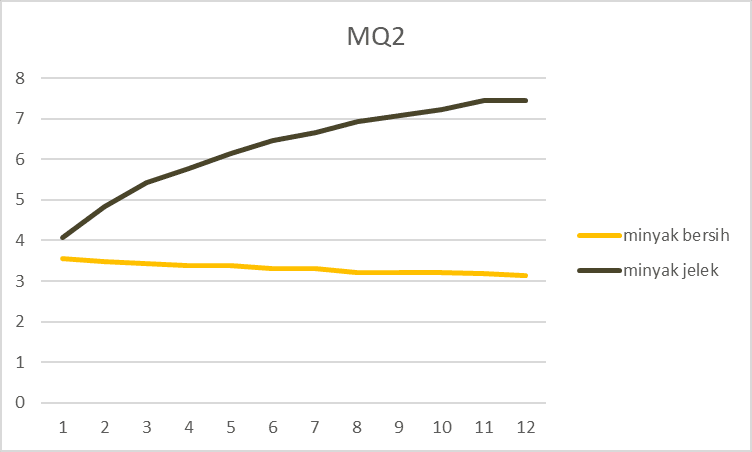
if ((nilai >520)||(hasil > 5))
{
Serial.print("2");
}
else if ((nilai <=
490)&&(hasil <= 5))
{
Serial.print("3");
}
else if ((nilai <= 520)&&(nilai > 490))
{
Serial.print("4");
}
else
{
Serial.print("5");
}
}
}
//SLAVE
#include <Wire.h>
#include <LiquidCrystal_I2C.h>
#include <Servo.h>
#define pump 7
LiquidCrystal_I2C lcd (0x27,16,2);
void setup() //Semua kode dalam fungsi ini dieksekusi
sekali
{
pinMode(pump, OUTPUT);
Serial.begin(9600);
//Set baud rate 9600
lcd.begin(16,2);
lcd.init();
lcd.backlight();
lcd.setCursor(0,0);
lcd.print(" Alat Filter ");
lcd.setCursor(0,1);
lcd.print("Minyak Otomatis");
}
void loop() //Semua program dalam
fungsi ini dieksekusi berulang
{
if (Serial.available() > 0)
{
int data = Serial.read();
Serial.println(data);
if (data == '1') //Jika data yang dikirimkan berlogika
{
lcd.setCursor(0,0);
lcd.print("Hasil Filter:
");
lcd.setCursor(0,1);
lcd.print("Minyak Berlebih");
}
else if (data == '2') //Jika data yang dikirimkan berlogika
{
lcd.setCursor(0,0);
lcd.print("Hasil Filter:
");
lcd.setCursor(0,1);
lcd.print("Minyak Jelek
");
digitalWrite(pump,HIGH);
}
else if (data == '3') //Jika data yang dikirimkan berlogika
{
lcd.setCursor(0,0);
lcd.print("Hasil Filter:
");
lcd.setCursor(0,1);
lcd.print("Minyak Bagus
");
digitalWrite(pump,LOW);
}
else
{
lcd.setCursor(0,1);
lcd.print("");
}
}
}
6. Video simulasi [kembali]
7.
File download
[kembali]
-->file html<<klik disini>>
-->file rangkaian<<klik disini>>
-->file video simulasi<<klik disini>>
-->Data Sheet Resistor<<klik disini>>
-->Data Sheet Relay<<klik disini>>
-->Data Sheet Sensor Gas<<klik disini>>
-->Data Sheet Sensor LDR <<klik disini>>
-->Data Sheet dioda<<klik disini>>
-->Data Sheet transistor<<klik disini>>
-->Data Sheet motor <<klik disini>>


Tidak ada komentar:
Posting Komentar